
Table of Contents
- What Is a BLDC Motor?
- ESC Explained: How It Works
- Types of ESCs in India 2026
- ESC Wiring Guide Step-by-Step
- ESC Throttle Calibration
- ESC Programming: BLHeli & SimonK
- Controlling ESC from Arduino
- Gimbal Motor ESC: Special Case
- Recommended BLDC & ESC Products
- FAQ
What Is a BLDC Motor?
A Brushless DC (BLDC) motor is an electric motor that uses electronic commutation rather than mechanical brushes and a commutator. This gives it several significant advantages over conventional brushed DC motors:
- Higher efficiency: No friction losses from brushes; typical efficiency is 85–95%
- Longer lifespan: No brushes to wear out; bearings are the only wearing part
- Higher power-to-weight ratio: BLDC motors can deliver far more power per gram than brushed motors
- Higher speed capability: No commutator arcing limits; some BLDC motors exceed 100,000 RPM
- Less electrical noise: No sparking from brush-commutator contact
BLDC motors are used in virtually every modern application requiring efficient variable-speed rotation: drones and UAVs, electric scooters and bikes, gimbal camera stabilisers, industrial CNC spindles, washing machine drums, air conditioner compressors, and electric vehicles.
Internally, a BLDC motor has three sets of stator windings (phases) arranged 120 degrees apart. An external controller — the ESC (Electronic Speed Controller) — switches current through these phases in the correct sequence to create a rotating magnetic field that the permanent magnet rotor follows.
ESC Explained: How It Works
An Electronic Speed Controller (ESC) is the brain that drives a BLDC motor. It receives a throttle command (usually as a PWM signal) and translates it into precisely timed three-phase AC-like pulses that rotate the motor at the desired speed.
Key ESC Functions
- Commutation: Switches the three motor phases in the correct sequence using six MOSFET switches in an H-bridge configuration
- Current limiting: Monitors and limits the current to protect both the ESC and motor
- Battery protection: Monitors battery voltage and cuts off when it drops too low (Low Voltage Cutoff / LVC)
- Braking: Can apply reverse current for active braking (if programmed)
- Speed regulation: Closed-loop control for consistent RPM under varying loads
ESC Ratings: What the Numbers Mean
An ESC like the 30A BLDC ESC has the following key specifications:
- 30A = continuous current rating in Amperes. This is the maximum sustained current the ESC can pass to the motor without overheating.
- Burst current = short-term peak (usually 40–60 A on a 30 A ESC) for 10–30 seconds
- Input voltage = typically 2S–4S LiPo (7.4 V – 14.8 V) for drone ESCs, or higher for e-bike ESCs
- BEC (Battery Eliminator Circuit) = optional onboard 5 V regulator to power the flight controller or receiver from the battery — eliminates the need for a separate receiver battery
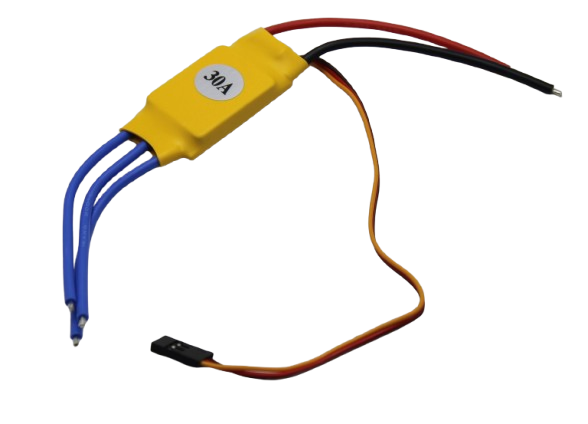
30A BLDC ESC Brushless Electronic Speed Controller
Reliable 30A ESC for quadcopters, fixed-wing aircraft, and robotics. Compatible with 2S–3S LiPo batteries. Supports standard PWM throttle input from flight controllers and Arduino.
Types of ESCs in India 2026
1. Standard PWM ESCs (Traditional)
Use a standard 50 Hz PWM signal with 1000–2000 µs pulse width for throttle control. Widely compatible with any microcontroller or RC receiver. Response time ~20 ms (one PWM frame). Best for most hobby and educational robotics projects.
2. Digital Protocol ESCs (DSHOT)
Modern drone ESCs use the DSHOT protocol (DSHOT150/300/600/1200) — a digital serial protocol that eliminates PWM noise and provides bi-directional telemetry (RPM, temperature, voltage). Requires a flight controller with DSHOT support. Not directly compatible with standard Arduino PWM output.
3. Sensored BLDC Controllers
These ESCs use Hall-effect sensors in the motor (three extra wires) to know the rotor position at all times, enabling smooth operation at very low RPM — important for e-bikes, electric scooters, and industrial drives where you need torque at near-zero speed. Sensorless ESCs (most hobby ESCs) require minimum startup RPM to detect back-EMF.
4. Gimbal ESCs
Gimbal motors (like the 2204 260KV and 2805 140KV) run at very low speeds and require a sinusoidal FOC (Field-Oriented Control) drive rather than simple six-step commutation. Dedicated gimbal controllers like SimpleBGC or Alexmos provide this. Standard hobby ESCs CANNOT drive gimbal motors properly.
ESC Wiring Guide Step-by-Step
Parts You Need
- BLDC motor (e.g., 2204 brushless motor)
- ESC (rated for motor’s peak current)
- LiPo battery (matching ESC’s input voltage range)
- PWM signal source (Arduino, flight controller, or RC receiver)
- Connectors: XT30/XT60 for power, 3.5 mm bullet connectors for motor phases
Wiring Steps
- Power Connections: Connect the ESC’s input leads (red = positive, black = negative) to the battery through an XT30 or XT60 connector. Always add a capacitor (470–1000 µF, voltage-rated above battery voltage) across the power leads to suppress voltage spikes.
- Motor Phase Connections: Connect the ESC’s three output wires (usually black, blue, yellow or red, black, white) to the motor’s three phase wires. The connection order determines rotation direction. If the motor spins the wrong direction, swap any two of the three phase wires.
- Signal Connection: Connect the ESC’s signal wire (usually white or yellow) to your PWM output pin on the Arduino or flight controller. Connect the signal ground (black wire in the servo connector) to Arduino GND. Do NOT connect the ESC’s red BEC wire if you are powering the Arduino separately — two 5 V sources connected together can cause current conflicts.
- No-Load Test First: Disconnect the motor before initial power-up. Verify the ESC powers up (usually plays a startup tone sequence) and responds to your PWM signal before connecting the motor.
Safety Rules
- Always remove propellers during ESC/motor testing
- Never short the battery leads — LiPo fires are dangerous
- Use an XT60 connector with a series resistor or pre-charge circuit to prevent spark on first plug-in
- Keep the ESC ventilated — heat is the main failure mode
ESC Throttle Calibration
Most hobby ESCs need to be calibrated to learn your controller’s throttle range (minimum and maximum PWM pulse widths). Without calibration, the ESC may not respond correctly to your input range.
Standard Calibration Procedure
- Set your throttle/PWM output to maximum (2000 µs)
- Connect the battery to the ESC
- Wait for the ESC startup tone, then a confirmation tone or series of beeps indicating it has registered the maximum point
- Move throttle to minimum (1000 µs)
- The ESC will beep to confirm the minimum point and exit calibration mode
- The ESC is now calibrated to your 1000–2000 µs range
Calibration is stored in the ESC’s non-volatile memory and only needs to be repeated if you change your controller or if the ESC behaves erratically.
ESC Programming: BLHeli & SimonK
Modern hobby ESCs run open-source firmware that can be reprogrammed to change their behaviour:
BLHeli / BLHeli_32 / BLHeli_S
The most popular ESC firmware for FPV drones. BLHeli_32 (for 32-bit ESCs) supports:
- DSHOT digital protocol
- Bidirectional DSHOT (RPM telemetry)
- 3D mode (bi-directional motor spin)
- Demag compensation (reduces power loss when motor decelerates rapidly)
- Programmable PWM frequency (24 kHz, 48 kHz, 96 kHz)
SimonK
An older firmware optimised for fast throttle response in multirotor applications. Less configurable than BLHeli but excellent for simple drone ESCs where fast loop rate matters most.
Programming Interface
BLHeli ESCs can be configured via:
- BLHeliSuite software (Windows) via a USB-UART adapter connected to the signal line
- Betaflight / Cleanflight passthrough (most common for drones — program all four ESCs from the flight controller)
- The ESC’s built-in beep-code programming menu (older method)
Controlling ESC from Arduino
You can control a standard PWM ESC from an Arduino using the Servo.h library, which produces the 50 Hz PWM signal with 1000–2000 µs pulse width that ESCs expect.
#include <Servo.h>
Servo esc;
void setup() {
esc.attach(9); // ESC signal wire to pin 9
// Calibration: send max then min on first run
esc.writeMicroseconds(2000); // Max throttle
delay(2000);
esc.writeMicroseconds(1000); // Min throttle (arm)
delay(2000);
}
void loop() {
// Ramp up from 0% to 50% throttle
for (int us = 1000; us <= 1500; us += 10) {
esc.writeMicroseconds(us);
delay(50);
}
delay(3000);
// Return to idle
esc.writeMicroseconds(1000);
delay(3000);
}Important notes for Arduino ESC control:
- Use a common ground between Arduino and ESC signal ground
- The ESC must be armed (received minimum throttle signal) before it will respond to throttle commands
- If using a BEC-equipped ESC: you can power Arduino from the ESC’s BEC 5 V output via the servo connector red wire
- Never send throttle above 0% while calibrating or if propellers are attached
Gimbal Motor ESC: Special Case
Gimbal motors like the 2204 260KV and 2805 140KV are not driven by a conventional ESC. They are specifically designed for camera stabilisation and operate at very low speeds (often just a few RPM) with precise torque control.

2204 260KV Brushless Gimbal Motor
High-precision brushless gimbal motor for camera stabilisation. Low KV rating for smooth torque at very low speeds. Requires a dedicated gimbal controller (SimpleBGC), not a standard ESC.

2805 140KV Gimbal Brushless Motor
Larger 2805 frame size with ultra-low 140KV rating for heavy-payload gimbals. Suitable for DSLR and action camera 2-axis or 3-axis gimbal builds.
Gimbal motors require a Field-Oriented Control (FOC) controller that drives all three phases simultaneously with sinusoidal currents. The SimpleBGC (AlexMos) 3-axis gimbal controller is the standard choice. You cannot use a hobby ESC for a gimbal motor — it will vibrate and fail to hold position.
Recommended BLDC & ESC Products
30A BLDC ESC Brushless Electronic Speed Controller
Versatile 30A ESC suitable for drones, RC planes, and brushless motor robotics. Standard PWM input compatible with Arduino and most flight controllers.
Frequently Asked Questions
What ESC do I need for a 2204 brushless motor?
If you are using the 2204 motor as a standard propulsion motor (drone, RC plane), a 20A–30A ESC is appropriate depending on your battery voltage and propeller size. However, if you are using the 2204 260KV specifically as a gimbal motor, you need a gimbal controller (SimpleBGC), not a conventional ESC.
Why does my BLDC motor beep when I connect the battery?
The startup beep sequence is normal — most ESCs play a series of tones to indicate: (1) battery voltage detected, (2) throttle at zero confirmed, (3) armed and ready. If the ESC plays an error code (many repetitive beeps), it typically indicates the throttle is not at zero, battery voltage is out of range, or a connection problem.
Can I control a BLDC motor without an ESC?
In theory yes — you could build a three-phase H-bridge and write your own commutation code. In practice, this is only done for learning purposes or for low-power motors in specialised projects. For any real-world application, use a purpose-built ESC. It handles current limiting, protection, and timing more reliably than a DIY solution.
What does KV mean for a BLDC motor?
KV is RPM per Volt (not kilovolts!). A 260KV motor on a 12V supply will spin at approximately 260 × 12 = 3,120 RPM at no load. Higher KV motors spin faster but produce less torque for a given motor size. Gimbal motors use low KV (100–300KV) for smooth low-speed torque; racing drone motors use high KV (2000–4000KV) for maximum speed.
How do I reverse the direction of a BLDC motor on an ESC?
For standard hobby ESCs: physically swap any two of the three motor phase wires. For BLHeli-32 ESCs: you can change the motor direction in BLHeliSuite software without rewiring. This is useful in drone builds where physical wire swapping is inconvenient.
Can I run an ESC without a BEC to power my Arduino?
Yes. Simply do not connect the red wire from the ESC servo connector, or cut it. Power your Arduino separately with a USB cable, a separate BEC/UBEC module, or a voltage regulator from your main battery. This is actually the safer approach when using high-current ESCs since BEC noise can interfere with Arduino ADC readings.
Conclusion
Understanding BLDC motors and ESCs opens up a world of high-performance motion control — from drones and e-bikes to camera gimbals and industrial automation. The key takeaways: choose an ESC with a current rating 20–30% above your motor’s expected peak, always calibrate throttle range before use, use the Servo.h library for simple Arduino control, and remember that gimbal motors need a dedicated FOC controller, not a conventional ESC.
Explore Zbotic’s range of BLDC ESCs, gimbal motors, and related components for your next project. Fast delivery across India.







Add comment