






Looking for Pixhawk 2.4.8 Drone Controller? Pixhawk 2.4.8 Drone Flight Controller PX4 32 Bit Autopilot – Good Quality is available at Zbotic with fast shipping across India.
Pixhawk 2.4.8 Drone Flight Controller PX4 32 Bit Autopilot – Good Quality
Description:
Choosing the right flight controller for your needs can be challenging, but zbotic.in is here to assist you in finding a high-quality option. Consider the Pixhawk 2.4.8 32-bit PX4 Autopilot flight controller for your drone application; simply check its specifications to see if it meets your requirements.
A common question in our community is, “What is a flight controller?” The answer is straightforward: the flight controller (FC) acts as the brain of the drone (quadcopter). It is a circuit board equipped with various sensors that monitor the drone’s movement and user commands, much like the Pixhawk 2.4.8. It processes this data to control motor speeds, guiding the drone’s movement as directed.
The Pixhawk 2.4.8 supports 8 RC channels and 4 serial ports, offering multiple user interfaces for programming, log review, and even mobile apps for smartphones and tablets. It automatically detects and configures all connected peripherals.
Key advantages of the Pixhawk system include a Unix/Linux-like programming environment, advanced autopilot capabilities, sophisticated scripting for missions and flight behaviors, and a custom PX4 driver layer that ensures precise timing across all processes.

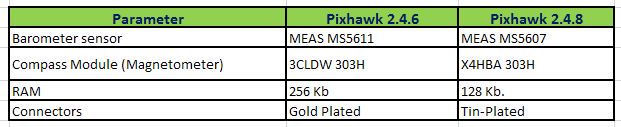
Difference between Pixhawk 2.4.8 & 2.4.6:
Features of Pixhawk 2.4.8:
- The advanced 32-bit ARM CortexM4 high-performance processors; can run NuttX RTOS real-time operating system.
- 14 PWM / servo output.
Bus interface (UART, I2C, SPI, CAN).
- The integrated backup power and backup controller fails; the primary controller fails over to the backup control is safe.
- Provide automatic and manual modes.
- Provide redundant power input and failover.
- Multicolor LED lights.
- Provide a multi-tone buzzer Interface.
- Micro SD card to record flight data.
Specifications:
Processor:
-
32bit STM32F427 Cortex M4 core with FPU.
-
32-bit STM32F103 failsafe co-processor.
-
168 MHz.
-
128 KB RAM.
-
2 MB Flash.
Sensors:
-
ST Micro L3GD20H 16 bit gyroscope.
-
ST Micro X4HBA 303H 14-bit accelerometer/magnetometer.
-
Invensense MPU 6000 3-axis accelerometer/gyroscope.
-
MEAS MS5607 barometer.
Interfaces:
-
5x UART (serial ports), one high-power capable, 2x with HW flow control.
-
2x CAN (one with an internal 3.3V transceiver, one on expansion connector).
-
Spektrum DSM / DSM2 / DSM-X® Satellite compatible input.
-
Futaba S.BUS® compatible input and output.
-
PPM sum signal input.
-
RSSI (PWM or voltage) input.
-
I2C.
-
SPI.
-
3.3 and 6.6V ADC inputs.
-
Internal micro USB port and external micro USB port extension.
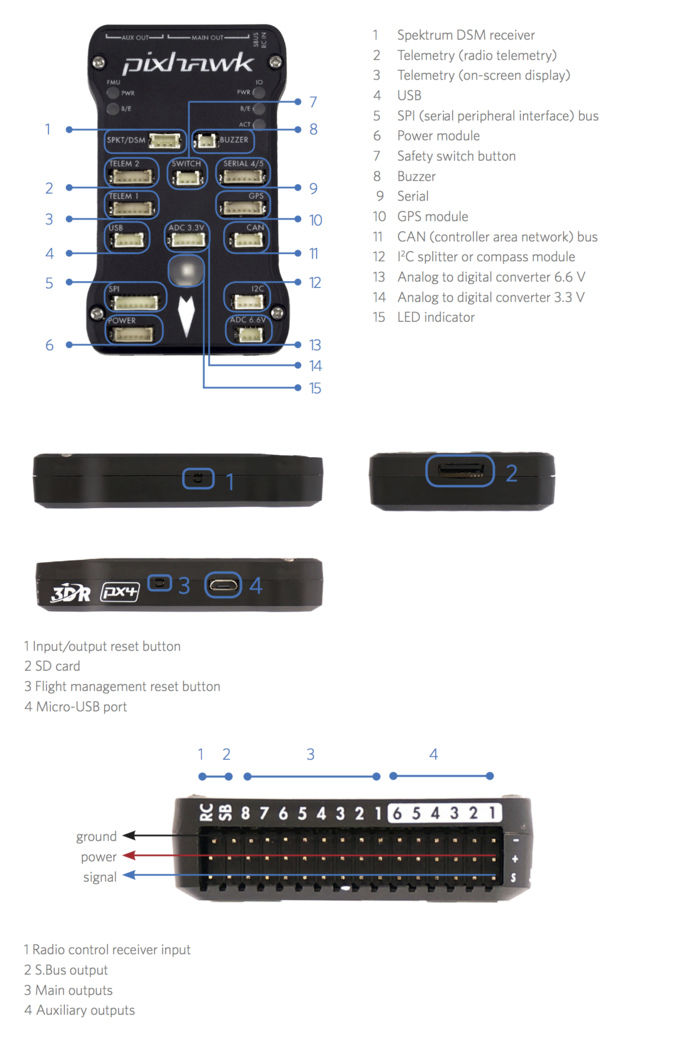
Pixhawk Pinout Connections Ports :
Package Includes :
1 x Pixhawk 2.4.8 32 Bit Autopilot PX4 Drone Flight Controller.
3 x Connecting Cables.
1 x Beep And Safety v1.2
1 x SD Adapter
Pixhawk 2.4.8 Drone Flight Controller PX4 32 Bit Autopilot Overview
The Pixhawk 2.4.8 is a high-quality 32-bit PX4 autopilot board designed as the central brain for multirotor and fixed-wing UAVs. Equipped with onboard gyrometer, accelerometer, barometer and magnetometer sensors, it delivers stable flight control and precise navigation.
Key Features of Pixhawk 2.4.8 Drone Flight Controller PX4 32 Bit Autopilot
- 32-Bit Cortex M4 Processor: Fast flight computations and real-time control.
- Supply Voltage 7V: Compatible with standard drone power systems.
- Multiple Bus Interfaces: UART, I2C, SPI and CAN ports for peripherals and telemetry.
- Onboard Sensors: Integrated gyroscope, accelerometer, barometer and magnetometer for attitude and altitude sensing.
- Mission Planner Firmware: Configurable flight parameters, waypoint planning and live monitoring.
- Micro SD Logging: Record detailed flight data for analysis and troubleshooting.
- Fast Shipping from Zbotic: Dispatched within 24 hours to most Indian locations.
Applications and Use Cases
- DIY multirotor projects: quadcopters, hexacopters and octocopters.
- Aerial photography and videography platforms requiring stable autopilot.
- Research and development in drone navigation and sensor fusion.
- Precision agriculture UAVs for crop monitoring and spraying.
- Fixed-wing mapping drones with waypoint missions.
- Educational platforms teaching flight control and robotics.
How to Use Pixhawk 2.4.8 Drone Flight Controller PX4 32 Bit Autopilot
Begin by mounting the Pixhawk on anti-vibration foam, connect a regulated 7V power module, attach GPS, RC receiver and motors via the provided I/O ports. Insert a FAT32-formatted micro SD card, then use Mission Planner software on your PC to calibrate sensors, configure flight modes and upload waypoints before your first test flight.
Why Buy from Zbotic?
- Genuine Products: All items sourced from authorized distributors
- Fast Shipping: Orders ship within 24 hours with tracking (non backordered products)
- Free Shipping: Free delivery on qualifying orders
- COD Available: Cash on Delivery, UPI, cards, net banking
- Technical Support: Expert help for setup and troubleshooting
- Easy Returns: Hassle-free replacement for defective products
Frequently Asked Questions
What power supply does the Pixhawk 2.4.8 require?
The Pixhawk 2.4.8 operates on a regulated 7V input, typically provided by a dedicated power module connected to your drone’s battery.
Can I connect additional peripherals to this flight controller?
Yes, the board offers UART, I2C, SPI and CAN ports for adding telemetry radios, companion computers, range finders and other sensors.
How do I record and access flight logs?
Insert a FAT32-formatted micro SD card into the onboard slot. Flight data such as attitude, GPS and battery status are automatically logged and can be retrieved by removing the card after landing.
Drone Swarm Basics: Coordinate Multiple UAVs with ArduPilot
Table of Contents What Is a Drone Swarm? ArduPilot Swarm Architecture Hardware Requirements for Each UAV Telemetry &...
Read More →
Long Range Cruiser Drone: 7-Inch Build for Exploration
Table of Contents Understanding Long Range Cruiser Drone Key Components and Requirements Step-by-Step Setup Guide Configuration and Optimisation...
Read More →
How to Get a DGCA Drone Pilot License in India (2026)
How to Get a DGCA Drone Pilot License in India (2026) India's drone sector has exploded over the...
Read More →Technical Specifications
| Brand | Pixhawk |
|---|---|
| Model | PX4 |
| Package Quantity | 4 pcs |
| SKU | AI1213 |
| Weight | 0.07 kg |
| Availability | In Stock |
Applications & Use Cases
The Pixhawk 2.4.8 Drone Flight Controller PX4 32 Bit Autopilot – Good Quality is a versatile flight controller & accessories used across a wide range of applications including autonomous drones, FPV racing quadcopters, agricultural drones, and surveying and mapping platforms.
Common use cases:
- Central brain for drone stabilization and navigation
- GPS waypoint missions for surveying
- Acro mode flying for FPV freestyle
This product is ideal for drone builders requiring precise flight control.
Technical Tip: F4 processors are good for basic builds; F7 or H7 recommended for advanced features. Ensure firmware compatibility (Betaflight, ArduPilot, iNAV).
Shipping & Delivery
- Free shipping on orders above ₹999 across India
- Dispatched within 1-3 business days
- Expected delivery: 3-7 business days depending on location
- Secure packaging to ensure safe transit of electronic components
- Genuine Pixhawk product sourced from authorized channels















{kind=link}
{kind=link}
Tarun Vohra (verified owner) –
Okay Pixhawk 2.4.8 Drone Flight Controller PX4. Gets the job done for my basic drone project. Nothing exceptional.
Akash Dubey (verified owner) –
Excellent Pixhawk 2.4.8 Drone Flight Controller PX4! Perfect for my quadcopter build. Arrived well packed and works flawlessly.
Atharv Mehta (verified owner) –
Okay Pixhawk 2.4.8 Drone Flight Controller PX4. Gets the job done for my basic drone project. Nothing exceptional.
Shreyas Rao (verified owner) –
Good quality Pixhawk 2.4.8 Drone Flight Controller PX4. Minor scratches on arrival but functionally perfect.
Rohit Thakur (verified owner) –
Solid Pixhawk 2.4.8 Drone Flight Controller PX4. Not the absolute best but excellent value for the price point.
Arun Modi (verified owner) –
Excellent product for the price. My drone flies smoothly with this Pixhawk 2.4.8 Drone Flight Controller PX4. Highly recommended!
Tejas Gupta –
Using this Pixhawk 2.4.8 Drone Flight Controller PX4 in my hexacopter. Smooth operation and excellent thrust.
Rajesh Choudhury (verified owner) –
Very impressed with this Pixhawk 2.4.8 Drone Flight Controller PX4. My drone’s performance improved noticeably.
Kritika Singh (verified owner) –
Pretty good Pixhawk 2.4.8 Drone Flight Controller PX4. Works as expected for my drone project. Would buy again.
Kabir Khurana (verified owner) –
Good quality Pixhawk 2.4.8 Drone Flight Controller PX4. Minor scratches on arrival but functionally perfect.
Jayesh Bajaj (verified owner) –
Excellent Pixhawk 2.4.8 Drone Flight Controller PX4! Perfect for my quadcopter build. Arrived well packed and works flawlessly.
Ayush Verma –
Good Pixhawk 2.4.8 Drone Flight Controller PX4. Works well for my drone build. Packaging could be slightly better.
Yash Chauhan (verified owner) –
Okay Pixhawk 2.4.8 Drone Flight Controller PX4. Gets the job done for my basic drone project. Nothing exceptional.
Sandhya Trivedi (verified owner) –
Solid Pixhawk 2.4.8 Drone Flight Controller PX4. Not the absolute best but excellent value for the price point.
Dinesh Panchal (verified owner) –
My 5th order from Zbotic. This Pixhawk 2.4.8 Drone Flight Controller PX4 is excellent as always. Totally reliable store.
Vansh Batra (verified owner) –
Received the Pixhawk 2.4.8 Drone Flight Controller PX4 in great condition. Testing done, everything works perfectly.
Aanya Saini (verified owner) –
Great Pixhawk 2.4.8 Drone Flight Controller PX4 for beginners and professionals alike. Highly recommended for drone enthusiasts.
Ashwin Rajan (verified owner) –
This Pixhawk 2.4.8 Drone Flight Controller PX4 is exactly what I needed for my drone. Works perfectly, very reliable.
Mayank Bisht (verified owner) –
Superb Pixhawk 2.4.8 Drone Flight Controller PX4! Built my first drone with this and it performed beyond expectations.
Kabir Mukherjee –
Nice Pixhawk 2.4.8 Drone Flight Controller PX4, does the job. Delivery took a couple of extra days but product is solid.
Arun Bhat (verified owner) –
Nice Pixhawk 2.4.8 Drone Flight Controller PX4, does the job. Delivery took a couple of extra days but product is solid.
Vidya Kulkarni –
Using this Pixhawk 2.4.8 Drone Flight Controller PX4 in my FPV drone build. Quality is top notch. Very happy with the purchase.
Kapil Iyer (verified owner) –
This Pixhawk 2.4.8 Drone Flight Controller PX4 exceeded my expectations. Installed it yesterday and took a successful test flight today.
Meera Arora (verified owner) –
Using this Pixhawk 2.4.8 Drone Flight Controller PX4 in my hexacopter. Smooth operation and excellent thrust.
Hitesh Reddy (verified owner) –
Superb Pixhawk 2.4.8 Drone Flight Controller PX4! Built my first drone with this and it performed beyond expectations.
Pankaj Saini (verified owner) –
Using this Pixhawk 2.4.8 Drone Flight Controller PX4 in my FPV drone build. Quality is top notch. Very happy with the purchase.