



APM 2.8 Flight Controller with Built-in Compass
If you’re looking to dive into electronics and build your own drone, the APM 2.8 Multicopter Flight Controller is an excellent option. This controller processes data from sensors to calculate the optimal speed for each motor and communicates this information to the Electronic Speed Controllers (ESCs), which then signal the motors. The APM 2.8 is an upgraded version of its predecessors, featuring a built-in compass for FPV RC drones while maintaining the same sensors as the APM 2.6. It allows users to switch between the internal compass and an external one, making it versatile for multirotors and rovers.
As a fully open-source autopilot system, the APM 2.8 has been recognized as the technology behind the winning entry in the Outback Challenge UAV competition. It enables any fixed or rotary-wing vehicle, as well as multirotors (including cars and boats), to become fully autonomous, capable of executing pre-programmed GPS missions with waypoints.
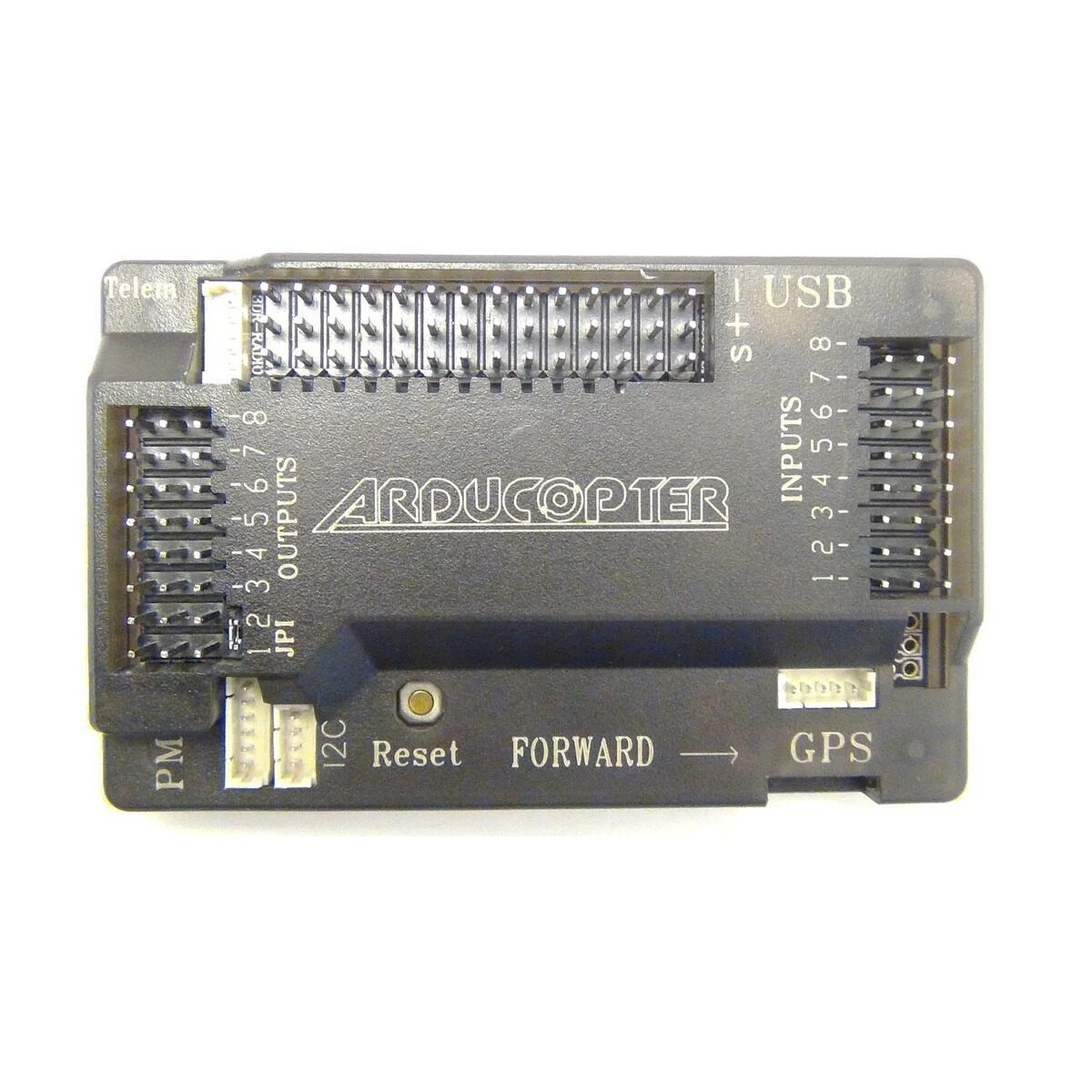
APM Flight controller Using the built-in compass:
To use the built-in compass simply connect the jumper as shown below. The APM board will use the external compass, during the compass jumper is removed.
Powerful ground control software features:
The downloadable mission planner software is used to configure and control your APM board:
- Point-and-click waypoint entry, using Google Maps.
- Select mission commands from drop-down menus.
- Download mission logs files and analyzes them.
- Configure APM settings for your airframe.
- Interface with a PC flight simulator to create a full hardware-in-the-loop UAV simulator.
- See the output from APM’s serial terminal.
Features :
- Straight Needle
- Arduino Compatible
- Onboard 4 MegaByte Dataflash chip for automatic data logging.
- Optional off-board GPS, a uBlox LEA-6H module with Compass.
- One of the first open-source autopilot systems to use Invensense’s 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel’s ATMEGA2560 and ATMEGA32U-2 chips for processing and USB functions respectively.
Specification:
| Power supply | LP2985-3.3. |
|---|---|
| Port | MUX (UART0, UART2, mnnI2, and OSD are optional, OSD is the defaulted output). |
| Input Voltage (V) | 12~16 VDC |
| Sensor | 3-Axis Gyrometer, Accelerometer, High-performance Barometer |
| Processor | ATMEGA2560 and ATMEGA32U-2 |
| Micro-SD Card Slot | No |
| Dimensions (LxWxH) mm | 70 x 45 x 15 |
| Weight (g): | 82 |
Package Includes :
1 x APM 2.8 Multicopter Flight Controller.
2 x Connecting Wires.
APM 2.8 Flight Controller with Built-in Compass Overview
The APM 2.8 Flight Controller with Built-in Compass is an open-source autopilot board designed for multicopters, rovers and fixed-wing aircraft. It processes sensor data via its ATMEGA2560 and ATMEGA32U-2 processors to calculate optimal motor speeds and communicates with Electronic Speed Controllers for precise flight control.
Key Features of APM 2.8 Flight Controller with Built-in Compass
- Built-in 3-axis compass with option to switch to an external compass for improved heading accuracy
- Dual processors (ATMEGA2560 + ATMEGA32U-2) for reliable sensor fusion and USB connectivity
- Wide input voltage range of 12–16 V to work with standard LiPo battery packs
- Compact 70 × 45 × 15 mm form factor, ideal for tight builds
- Fully open-source ArduPilot firmware support for customization and community-driven updates
- Genuine product, fast shipping from Zbotic for all in-stock items
Applications and Use Cases
- Building custom quadcopters and hexacopters for aerial photography or surveying
- Developing FPV racing drones with reliable heading hold
- Integrating into autonomous rovers for field robotics experiments
- Educational projects teaching UAV flight control and coding
- Prototyping research platforms in drone labs and hobby workshops
How to Use APM 2.8 Flight Controller with Built-in Compass
Mount the APM 2.8 on a level platform and wire your power module (12–16 V) to the power input. Connect each ESC signal wire to the corresponding output header, then plug in your RC receiver. Use the Mission Planner software over USB to calibrate accelerometers, gyros and the built-in compass. Adjust flight parameters as needed before maiden flight.
Why Buy from Zbotic?
- Genuine Products: All items sourced from authorized distributors
- Fast Shipping: Orders ship within 24 hours with tracking (non backordered products)
- Free Shipping: Free delivery on qualifying orders
- COD Available: Cash on Delivery, UPI, cards, net banking
- Technical Support: Expert help for setup and troubleshooting
- Easy Returns: Hassle-free replacement for defective products
Frequently Asked Questions
What input voltage does the APM 2.8 support?
The APM 2.8 requires a stable 12–16 V supply, typically provided by a 3S or 4S LiPo battery via a compatible power module.
How do I switch between the internal and external compass?
Connect your external compass module to the I2C port, then use Mission Planner to set the COMPASS_USE or COMPASS_EXTERNAL parameters to enable the external unit and disable the internal compass.
Can I configure this controller with ArduPilot Mission Planner?
Yes. The APM 2.8 runs the open-source ArduPilot firmware and can be configured, calibrated and updated via Mission Planner on Windows, macOS or Linux.

Long-Range FPV: ExpressLRS Setup Guide India
Setting up ExpressLRS for long-range FPV in India gives you a high-performance, open-source radio link that outperforms proprietary...
Read More →
Long Range FPV Drone: How to Build a 50km+ Fixed Wing UAV in India (2026)
Fixed-wing UAVs capable of flying 50 kilometres or more represent the pinnacle of amateur and professional drone engineering....
Read More →
Long Range Cruiser Drone: 7-Inch Build for Exploration
Table of Contents Understanding Long Range Cruiser Drone Key Components and Requirements Step-by-Step Setup Guide Configuration and Optimisation...
Read More →Technical Specifications
| SKU | AI1212 |
|---|---|
| Weight | 0.050001 kg |
| Availability | Out of Stock |
Applications & Use Cases
The APM 2.8 Flight Controller with Built-in Compass is a versatile flight controller & accessories used across a wide range of applications including autonomous drones, FPV racing quadcopters, agricultural drones, and surveying and mapping platforms.
Common use cases:
- Central brain for drone stabilization and navigation
- GPS waypoint missions for surveying
- Acro mode flying for FPV freestyle
This product is ideal for drone builders requiring precise flight control.
Technical Tip: F4 processors are good for basic builds; F7 or H7 recommended for advanced features. Ensure firmware compatibility (Betaflight, ArduPilot, iNAV).
Shipping & Delivery
- Free shipping on orders above ₹999 across India
- Dispatched within 1-3 business days
- Expected delivery: 3-7 business days depending on location
- Secure packaging to ensure safe transit of electronic components

















{kind=link}
{kind=link}
Sanjay Kumar Y R (verified owner) –
Good
Yashwant Nayak –
Excellent APM 2.8 Flight Controller with Built-in! Perfect for my quadcopter build. Arrived well packed and works flawlessly.
Shreyas Saini (verified owner) –
Very good quality APM 2.8 Flight Controller with Built-in. I’ve been building drones for 2 years now and this is one of the best I’ve used.
Aanya Malhotra (verified owner) –
Superb APM 2.8 Flight Controller with Built-in! Built my first drone with this and it performed beyond expectations.
Alexey Mikhaylov (verified owner) –
Aisha Gupta (verified owner) –
Perfect for my agriculture drone project. This APM 2.8 Flight Controller with Built-in handles the weight effortlessly.
Diya Vohra (verified owner) –
Using this APM 2.8 Flight Controller with Built-in in my hexacopter. Smooth operation and excellent thrust.
Vidya Tandon (verified owner) –
My 5th order from Zbotic. This APM 2.8 Flight Controller with Built-in is excellent as always. Totally reliable store.
Akshat Shetty (verified owner) –
Pretty good APM 2.8 Flight Controller with Built-in. Works as expected for my drone project. Would buy again.
Tejas Choudhury (verified owner) –
Been using this APM 2.8 Flight Controller with Built-in for 3 months now, zero issues. Great product.
Tanya Menon (verified owner) –
Top quality APM 2.8 Flight Controller with Built-in. I’m a regular customer of Zbotic and they never disappoint.
Nikhil Iyer (verified owner) –
Solid APM 2.8 Flight Controller with Built-in. Not the absolute best but excellent value for the price point.
Swati Verma (verified owner) –
Okay APM 2.8 Flight Controller with Built-in. Gets the job done for my basic drone project. Nothing exceptional.
Sarika Bhat (verified owner) –
Good APM 2.8 Flight Controller with Built-in. Works well for my drone build. Packaging could be slightly better.
Nikita Saini (verified owner) –
Good quality APM 2.8 Flight Controller with Built-in. Minor scratches on arrival but functionally perfect.
Kapil Arora (verified owner) –
Bought this for my college drone project. Works great, professor was impressed!
Chetan Iyer –
Received the APM 2.8 Flight Controller with Built-in in great condition. Testing done, everything works perfectly.
Neha Nair (verified owner) –
Excellent product for the price. My drone flies smoothly with this APM 2.8 Flight Controller with Built-in. Highly recommended!