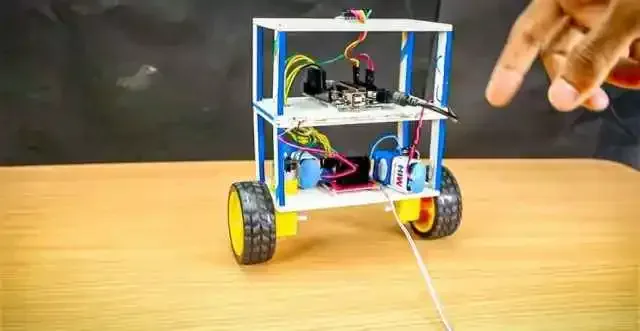
Read more Self-balancing robot with MPU6050 accelerometer from Arduino February 4, 2023 / 0 We will use Arduino to build a self-balancing robot for this robotics project. We can learn how to control the... Continue reading