
GPS NEO-6M Accuracy: Tips to Improve Position Fix Quality
If you’ve ever tried to get a reliable GPS NEO-6M accuracy improve fix for your Arduino or STM32 project, you know the frustration—coordinates that drift by 10–30 metres, satellites that take forever to lock, or a position that jumps erratically in an open field. The NEO-6M is one of the most popular GPS modules among Indian makers because it’s affordable and widely available, but getting the best out of it requires understanding a handful of hardware and software tricks. In this guide, we’ll walk through everything you need to squeeze centimetre-class stability from this budget-friendly module.
Understanding the NEO-6M Hardware
The u-blox NEO-6M is a 50-channel GPS receiver capable of tracking up to 16 satellites simultaneously. It outputs standard NMEA 0183 sentences over UART at 3.3 V logic (5 V tolerant on most breakout boards). Out of the box, the module provides a typical horizontal accuracy of 2.5 metres CEP (Circular Error Probable) under open sky—meaning 50% of fixes fall within a 2.5 m radius. However, in real-world conditions—urban canyons, rooftop installations, or near metal enclosures—that figure can balloon to 20–50 metres.
Key specs to keep in mind:
- UART baud rate: 9600 bps default (configurable up to 115200)
- Update rate: 1 Hz default (up to 5 Hz)
- TTFF (cold): ~27 seconds open sky
- Operating voltage: 3.3 V (most breakouts include a 3.3 V regulator)
- Backup battery: Coin cell keeps ephemeris data for faster warm starts

GPS NEO-6M Satellite Positioning Module for Arduino / STM32
The classic NEO-6M breakout with onboard LNA, ceramic patch antenna connector, and UART interface. Perfect for drone navigation and vehicle tracking projects.
Antenna Placement: The Single Biggest Factor
No amount of software tuning can compensate for a badly placed antenna. This is the single most impactful improvement you can make. Here are the rules:
Outdoor Sky View Is Non-Negotiable
GPS satellites transmit at extremely low power (~20 W from 20,200 km altitude). By the time the signal reaches your antenna, it’s around -130 dBm—weaker than typical Wi-Fi by 100 dB. Any obstruction—a concrete roof, a metal enclosure lid, even a human body—can attenuate the signal enough to drop satellites. Mount the antenna with a clear 90° sky view in all azimuth directions.
Ground Plane Matters
The ceramic patch antenna on the NEO-6M is designed to work over a ground plane. Mounting it directly on a PCB with a solid copper pour underneath improves gain by 3–5 dB. A 70×70 mm copper ground plane is the sweet spot for the standard 25×25 mm ceramic patch.
Keep Away From RF Sources
Wi-Fi modules (2.4 GHz), GSM modems (900/1800 MHz), and even fast-switching buck converters generate RF noise that desensitizes the GPS front-end. Maintain at least 5 cm clearance from these sources, and use a ferrite bead on the power rail feeding the GPS module.
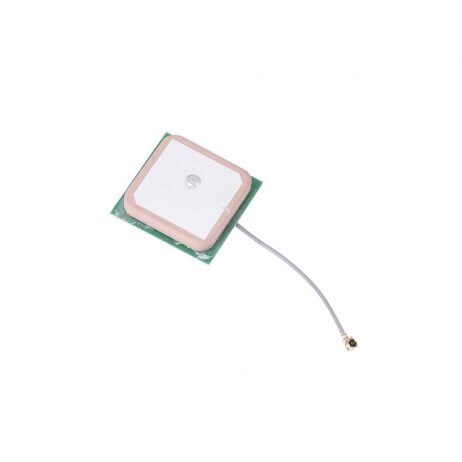
25×25×8mm 28dB High Gain Active GPS Antenna for NEO-6M/7M/8M
Ceramic active GPS antenna with built-in LNA providing 28 dB gain. The integrated amplifier compensates for cable loss and improves satellite lock in marginal conditions.
Cold Start vs Warm Start vs Hot Start
Time To First Fix (TTFF) is often confused with accuracy, but they’re related: a longer, more complete fix with more satellites always yields better accuracy.
- Cold start: No stored data. Module must download full almanac (~12 min) and ephemeris (~30 s per satellite). TTFF: 27–45 s typical. Always occurs when the battery-backed RAM is empty or expired.
- Warm start: Almanac stored, ephemeris expired. Module knows satellite positions approximately. TTFF: 5–15 s.
- Hot start: Both almanac and fresh ephemeris (<2 hours old) available. TTFF: 1–3 s.
How to Achieve Consistent Hot Starts
Connect a CR2032 coin cell (or a supercapacitor) to the VBAT pin on your NEO-6M breakout. The backup current is only ~15 µA, so a fresh CR2032 will power the RTC and RAM for over two years. With valid ephemeris, your module will achieve sub-3-second locks on every power-up—a dramatic improvement for battery-powered field devices.
NMEA Sentence & Update Rate Configuration
The NEO-6M uses u-blox’s UBX binary protocol for configuration. You can send UBX messages over UART to tune the module without any special tools—just the Arduino Serial library.
Disable Unused NMEA Sentences
By default, the module outputs GGA, GLL, GSA, GSV, RMC, and VTG every second. On a 9600 baud link, this fills your serial buffer. Disabling GSV (satellite details) and GLL (lat/lon only) reduces UART load and gives your parser more time to handle GGA and RMC accurately:
// Disable GPGSV sentence
uint8_t disableGSV[] = {0xB5,0x62,0x06,0x01,0x08,0x00,0xF0,0x03,0x00,0x00,0x00,0x00,0x00,0x00,0x02,0x38};
Serial1.write(disableGSV, sizeof(disableGSV));Increase Update Rate to 5 Hz
For dynamic applications (drones, RC cars), push the update rate to 5 Hz. First, raise the baud rate to 57600, then send the measurement rate UBX-CFG-RATE message:
// Set measurement period to 200ms (5 Hz)
uint8_t setRate5Hz[] = {0xB5,0x62,0x06,0x08,0x06,0x00,0xC8,0x00,0x01,0x00,0x01,0x00,0xDE,0x6A};
Serial1.write(setRate5Hz, sizeof(setRate5Hz));Enable SBAS (NavIC / GAGAN in India)
India’s GAGAN (GPS Aided GEO Augmented Navigation) system provides SBAS corrections that improve horizontal accuracy from 2.5 m to under 1 m in open sky. Enable SBAS via UBX-CFG-SBAS with PRN 127 (GSAT-8) and PRN 128 (GSAT-10). The NEO-6M supports SBAS out of the box—you just need to enable it:
// Enable SBAS (GAGAN PRN 127, 128)
uint8_t enableSBAS[] = {0xB5,0x62,0x06,0x16,0x08,0x00,0x01,0x07,0x03,0x00,0x00,0x00,0x00,0x00,0x2F,0xB1};
Serial1.write(enableSBAS, sizeof(enableSBAS));Software Filtering Techniques
Even with a perfect antenna and SBAS corrections, GPS coordinates jump around slightly. For static installations or slow-moving platforms, software filtering eliminates this noise.
Kalman Filter (Recommended)
A simple 1D Kalman filter applied to both latitude and longitude produces remarkably stable output. The filter balances process noise (how much you expect the position to change) against measurement noise (GPS error). Libraries like TinyEKF work on Arduino Mega and ESP32.
Moving Average
For truly static installations—weather stations, fixed asset trackers—a circular buffer of the last N readings averaged together eliminates most jitter. A window of 10 samples (at 1 Hz = 10 seconds) reduces noise by roughly √10 ≈ 3×.
HDOP-Based Fix Acceptance
HDOP (Horizontal Dilution of Precision) is reported in the GGA sentence. A value below 1.5 indicates an excellent fix; above 5.0 is poor. Reject fixes with HDOP > 2.0 for critical applications:
if (gps.hdop.isValid() && gps.hdop.value() < 200) { // HDOP * 100
// Use this fix
}Power Supply Quality and Noise Reduction
The NEO-6M’s RF front-end is extremely sensitive. A noisy 3.3 V rail will desensitize the receiver and reduce the number of visible satellites. Here’s how to clean it up:
- Use an LDO regulator: AMS1117-3.3 or MIC5205 produce cleaner output than switching regulators. If you must use a buck converter, add a 10 µH inductor + 100 µF electrolytic + 100 nF ceramic filter after it.
- Decouple at the module: Place a 100 µF electrolytic and a 100 nF ceramic capacitor as close to the VCC pin as possible.
- Separate grounds: Run the GPS module on its own ground trace back to the main ground pour. Avoid sharing the return path with high-current motor drivers.
- Shield the module: A simple copper tape shield around the module (not covering the antenna!) reduces conducted and radiated interference significantly.
Using the EPROM for Faster Fixes
Some NEO-6M breakouts (like the variant sold on Zbotic) include an EPROM (24C32 I2C EEPROM) for non-volatile configuration storage. This allows you to save your custom UBX configuration (baud rate, update rate, SBAS settings) so it survives power cycles without the CR2032 backup battery. To save the current configuration to EPROM, send a UBX-CFG-CFG message:
// Save current config to EPROM
uint8_t saveConfig[] = {0xB5,0x62,0x06,0x09,0x0D,0x00,0x00,0x00,0x00,0x00,
0xFF,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x17,0x31,0xBF};
Serial1.write(saveConfig, sizeof(saveConfig));
NEO-6M GPS Module with EPROM
Includes the 24C32 EEPROM chip for persistent configuration storage. Save your SBAS, baud rate, and update rate settings across power cycles without a backup battery.

Adafruit FONA 808 – Mini Cellular GSM + GPS Breakout
Combines GPS tracking with GSM connectivity for real-time vehicle and asset tracking. Ideal when you need both location and data uplink in a compact form factor.
Frequently Asked Questions
Why does my NEO-6M take 5–10 minutes to get a first fix indoors?
GPS signals cannot penetrate most building materials. Indoors, the module is receiving reflected and severely attenuated signals. Move the antenna to a window ledge or outdoors. Even a 28 dB active antenna will not reliably achieve a fix through reinforced concrete. For truly indoor positioning, consider Bluetooth beacons or Wi-Fi trilateration instead.
What is HDOP and what value should I target?
HDOP (Horizontal Dilution of Precision) quantifies the geometric spread of visible satellites. HDOP ≤ 1.0 is ideal; 1–2 is excellent; 2–5 is acceptable; >5 means poor geometry and you should expect degraded accuracy. For a drone or vehicle tracker, set your code to hold position updates when HDOP exceeds 2.5.
Can I use the NEO-6M at 10 Hz update rate?
The NEO-6M hardware supports a maximum of 5 Hz. The NEO-7M and NEO-M8N support 10 Hz. Attempting to configure 10 Hz on a NEO-6M will result in the module defaulting back to 5 Hz or producing corrupted output.
My coordinates drift even when the module is stationary. How do I fix it?
This is normal GPS behaviour called “position wander.” Enable the stationary mode via UBX-CFG-NAV5 (dynamic model 2 = stationary), which applies a zero-velocity filter and dramatically reduces wander. You can also enable SBAS and implement a software moving-average filter as described above.
Does the NEO-6M support GLONASS or Galileo?
No. The NEO-6M is GPS-only (L1 C/A). For multi-constellation support (GPS + GLONASS + BeiDou + Galileo), upgrade to the u-blox NEO-M8N or M9N. Multi-constellation receivers typically achieve 1.5 m CEP or better due to more visible satellites.
Ready to Build Your GPS Project?
Get the NEO-6M module and active antenna from Zbotic — fast shipping across India with expert support for your maker projects.





Add comment