
A gripper mechanism is the end-effector that gives a robot the ability to interact with the physical world — picking, placing, assembling, and manipulating objects. The two most common gripper types are the parallel jaw gripper and the angular jaw gripper. Understanding the differences in design, actuation, and application will help you choose the right mechanism for your robot project. This guide covers the engineering principles, design tradeoffs, and practical implementation tips for both types.
Why Gripper Type Matters
The wrong gripper type can make an otherwise capable robot arm useless in a specific application. Consider:
- Object geometry: Flat, cylindrical, irregular, fragile?
- Required grip force: Grams for delicate electronics vs kilograms for industrial parts
- Stroke (jaw opening range): How much does the jaw need to open to accept the largest object?
- Centering behavior: Does the object need to be centered on the gripper axis?
- Space constraints: How much does the gripper add to the robot’s reach envelope?
These factors determine whether a parallel or angular jaw gripper — or something else entirely — is the right choice.
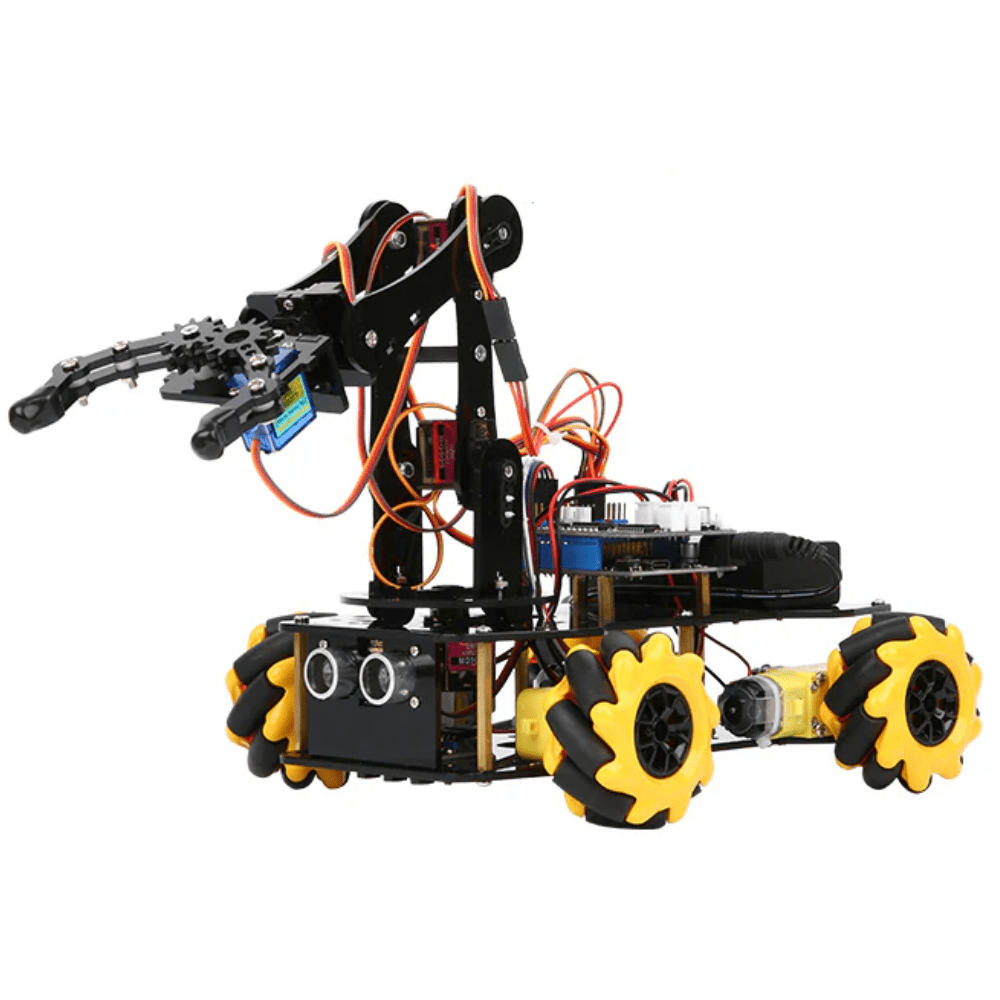
ACEBOTT ESP32 5-DOF Robot Arm Kit Expansion Pack for QD001–QD007
5-degree-of-freedom robot arm with integrated gripper and ESP32 control. Perfect for studying gripper mechanisms and arm kinematics together.
Parallel Jaw Grippers: Design and Mechanics
In a parallel jaw gripper, the two jaws move in opposite directions along a linear axis, maintaining their faces parallel to each other throughout the stroke. This is the dominant design in industrial robotics (Schunk, Zimmer, OnRobot all offer parallel grippers).
Kinematic Principles
The jaws are typically driven by one of these mechanisms:
- Rack and pinion: A central gear drives two opposing racks (one per jaw). Mechanically simple, excellent force transmission, commonly 3D-printable. Used in most hobby and educational grippers.
- Double-acting pneumatic piston: Industrial standard. Air pressure drives a piston which via a wedge or rack translates to linear jaw motion. Very high force density.
- Lead screw / ball screw: A single screw with opposing threads (left/right hand) drives both jaws simultaneously. High-precision, zero backlash options available.
- Linkage mechanism: Four-bar linkages convert rotary actuator motion to parallel linear jaw travel. Compact but requires careful dimensional design.
Characteristics
- Self-centering: Because both jaws move equal distances from center, the gripped object is always centered on the gripper axis — critical for pick-and-place applications where object position must be predictable.
- Consistent orientation: Jaw faces stay perpendicular to the motion axis, ideal for gripping flat-sided objects (rectangular boxes, PCBs, cylinders from the side).
- Variable stroke range: Jaws must be sized for the full range of object sizes. Opening stroke limits the maximum object width.
Angular Jaw Grippers: Design and Mechanics
Angular jaw grippers (also called radial or pivoting jaw grippers) have jaws that rotate around fixed pivot points, like a pair of pliers or scissors. The jaw tips describe arc paths as they open and close.
Kinematic Principles
Common actuation mechanisms:
- Direct servo-to-jaw linkage: A servo horn connects via a rigid rod to the jaw lever arm. Simple, direct, easy to implement with an SG90 or MG996R servo.
- Cam mechanism: A rotating cam pushes two symmetrical jaws simultaneously. Provides a defined force profile as a function of jaw angle.
- Scissor linkage: Both jaws are connected by an X-linkage to a single actuator. Used in scissor-style grippers for thin object grasping.
Characteristics
- Changing approach angle: Because jaw tips move in an arc, the effective gripping geometry changes with jaw opening angle. Jaws can wrap around curved objects more naturally.
- Larger gripping range per stroke: A small angular rotation at the pivot produces a large movement at the jaw tip — good for wide-range applications.
- Not self-centering (usually): Unless the linkage is precisely symmetric and both jaws are actuated from a common mechanism, slight asymmetry can shift the object off-center.
- Compact actuator: The angular amplification of the lever arm means a lower-torque actuator can still produce useful jaw tip force.

TowerPro SG90 180 Degree Rotation Servo Motor
The classic lightweight servo for hobby grippers. 180g operating weight, 1.8kg-cm stall torque, fits standard servo mounts. Great for angular jaw gripper projects.
Side-by-Side Comparison
| Feature | Parallel Jaw | Angular Jaw |
|---|---|---|
| Jaw motion | Linear (translational) | Rotational (arc path) |
| Self-centering | Yes | Depends on design |
| Best for | Prismatic/cylindrical objects, pick-and-place | Circular/irregular objects, wide-range grasping |
| Mechanical complexity | Medium (rack/pinion or screw) | Low (direct servo linkage) |
| DIY difficulty | Medium | Easy |
| Force at jaw tip | Direct, consistent across stroke | Varies with jaw angle (moment arm changes) |
| Compact design | Moderate | Very compact |
Actuation: Servo vs Pneumatic vs Linear Actuator
Hobby Servo (SG90, MG996R)
The simplest option for DIY grippers. Pros: cheap (₹50–₹350), easy PWM control, built-in position control. Cons: limited torque, plastic gears on SG90 strip easily. Use metal-gear servos (MG90S, DS3225) for anything over 200g payload.
Stepper Motor (28BYJ-48, NEMA17)
More precise position control and higher torque density than hobby servos. 28BYJ-48 is cheap but very slow. NEMA17 with a lead screw drive can produce surprisingly high jaw forces (5–30N). Requires a motor driver (A4988, DRV8825, TMC2208).
Linear Actuator / Mini Electric Cylinder
High force in a compact package. Available in 12V and 24V versions. Force ranges from 5N to 1000N+. Ideal for parallel jaw grippers requiring >10N grip force.
Pneumatic
Used in industrial settings for high-speed, high-cycle-life applications. 6–8 bar compressed air. Not practical for hobby robots without an air compressor, but parallel pneumatic grippers from SMC/Festo are available in India from industrial distributors at ₹3,000–₹15,000.
Servo Mount Holder Bracket for SG90/MG90 (Pack of 2)
Aluminium servo brackets for securely mounting SG90/MG90 servos into robot arm joints and gripper mechanisms. Lightweight and rigid.
Gripping Force Calculation
For a servo-actuated angular jaw gripper, the force at the jaw tip (F_jaw) relates to servo torque (T_servo) and lever arm length (L_arm):
F_jaw = T_servo / L_arm
// Example: SG90 stall torque = 1.8 kg·cm = 0.176 N·m
// Lever arm = 3cm = 0.03m
F_jaw = 0.176 / 0.03 = 5.9 N ≈ 600g forceImportant: this is at stall (zero velocity). Actual gripping force at rated current is typically 70% of stall torque. Also, the effective lever arm changes as jaws open/close in an angular gripper — the force is highest when jaws are nearly closed (shortest arc moment arm).
For picking objects, apply a safety factor of 2–3× the object weight to account for inertia during acceleration. To pick a 200g object, you need at least 400–600g (4–6N) of grip force plus friction coefficient of the jaw surface.
Building a DIY Servo Gripper
Here’s a minimal angular jaw gripper you can build in an afternoon:
Parts needed:
- 1× SG90 or MG90S servo
- 2× laser-cut or 3D-printed jaw pieces (link to Thingiverse for MK3S-printable designs)
- 2× M3 pivot screws with lock nuts
- 1× servo horn (included with servo)
- 1× 3D-printed or aluminium base plate
Control (Arduino):
#include <Servo.h>
Servo gripper;
void setup() {
gripper.attach(9); // PWM pin
gripper.write(90); // Start at 90° (half-open)
}
void grip() { gripper.write(160); delay(500); } // Close
void release(){ gripper.write(30); delay(500); } // Open
void loop() {
grip();
delay(2000);
release();
delay(2000);
}Tune the degree values (30 and 160) based on your physical jaw geometry. Add rubber tips (heat-shrink tubing or silicone mat cuts) to the jaws to increase friction and prevent object slipping.

DIY Acrylic Robot Manipulator Mechanical Arm Kit (without Servo and Board)
Complete acrylic arm and gripper structure kit. Add your own servos and controller to build a fully functional multi-DOF robot arm with parallel gripper mechanism.
Frequently Asked Questions
Q: Can one gripper type handle both flat and round objects?
Yes, with jaw design adaptation. V-groove jaws on a parallel gripper can grip both flat parts (along the flat face) and round parts (in the V groove). Curved jaw tips on an angular gripper similarly work for multiple profiles.
Q: What’s the best gripper for an educational robot arm project?
An angular jaw gripper driven by a single SG90 or MG90S servo is the best starting point — simple to print/build, easy to program, and inexpensive. Move to a parallel design once you need precise centering.
Q: How do I add force sensing to a gripper?
Insert a load cell (5kg or 10kg rated) into the jaw linkage, or use a Force Sensitive Resistor (FSR) on the jaw face. Read the output with an HX711 amplifier. Implement a force-controlled servo loop to grasp at a target force rather than a target position.
Q: What materials are best for 3D printing gripper parts?
PETG for structural parts (better impact resistance than PLA, more heat-tolerant). TPU for jaw tips (flexible, high friction, protects delicate objects). Use 40–50% infill with 3–4 perimeters for structural jaw and base parts.
Q: How many degrees of freedom does a gripper need?
A basic 2-finger gripper needs only 1 DOF (open/close). More DOF (rotating wrist, tilting jaws) increase adaptability but also complexity, weight, and control difficulty. Start with 1 DOF and add DOF incrementally as needed.
Zbotic stocks SG90 servos, MG90S metal-gear servos, servo brackets, robot arm kits, and stepper motors for all types of gripper mechanisms. Shop the Robotics & Automation collection and design your perfect end-effector.






Add comment