



Features
- ①Stable angle output, yaw angle: 0.5″RMS, posture: 0.1*RMS
- ②Gyroscope automatic calibration technology
- ③Gyroscope bias, acceleration calibration, magnetometer calibration
- ④Integrated posture solver
- ⑤Serial port TTL, I2C communication port
- ⑥360° Stable and continuous angle output
- ⑦Built-in barometer for altitude measurement
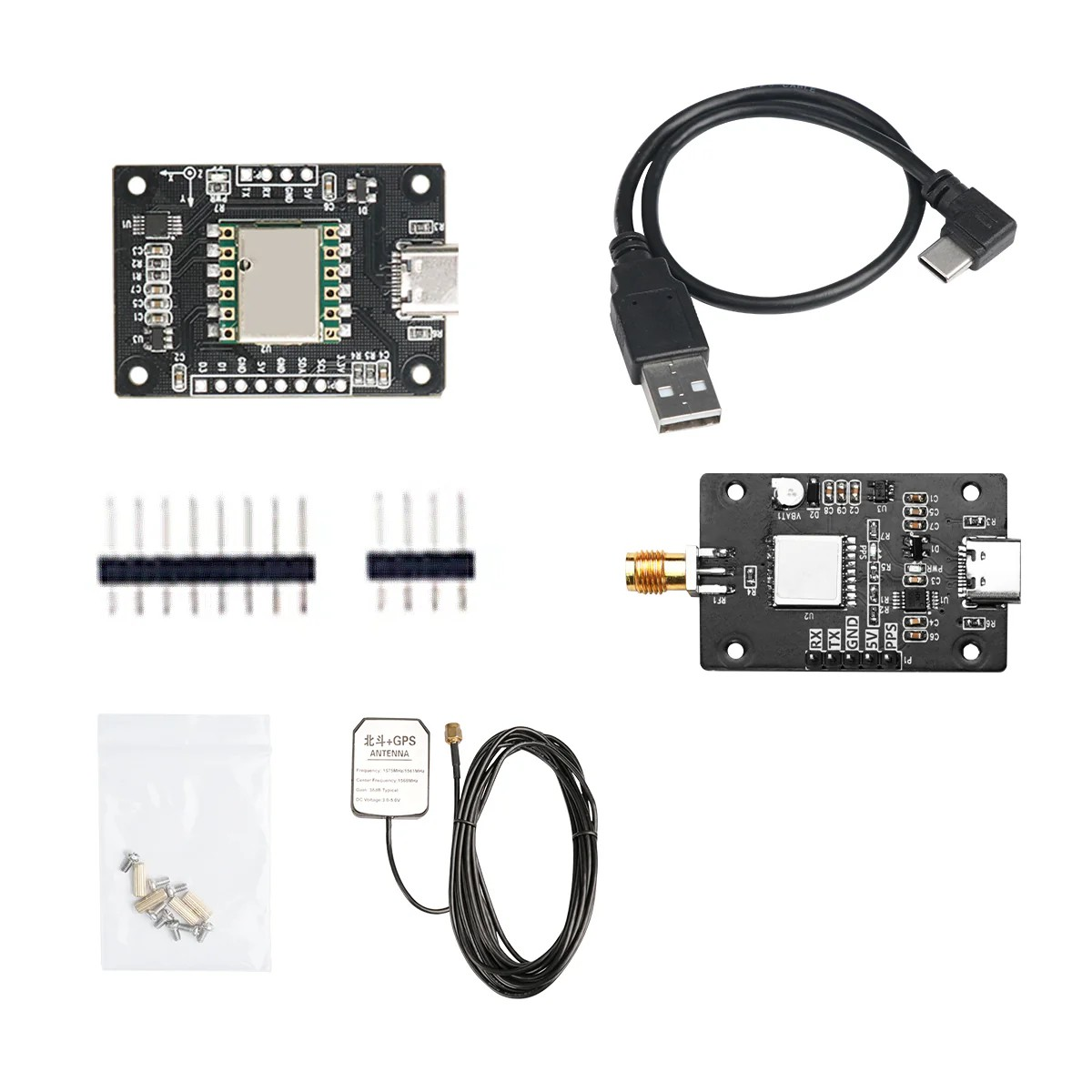
- ⑧Receive serial GPS data in accordance with the NMEA-0183 standard to establish a GPS-IMU navigation integration unit









Basic Parameters
| Parameter | Note | Parameter | Note |
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps – 921600bps. | Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit | I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Output speed | 10Hz by default. It can set to 0.2-200Hz | Working voltage | 5V or 3.3V |
| Operating temperature | -40-85℃ | Working current | 12mA |
| Storage temperature | -40-100℃ | Start-up duration | 1000ms |
| Shock resistance | 20kg | Support | ROS1/ ROS2 |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more | PC software compatible system | Windows |
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm | Weight | Without shell: 5.7g; With shell: 50g |
| Parameter | Condition | Classic value |
| Range | – | ±16g |
| Resolution | ±16g | 0.0005(g/LSB) |
| RMS noise | bandwidth=100Hz | 0.75-1mg-rms |
| Zero drift | Placed horizontally | ±20-40mg |
| Temperature drift | -40~+85℃ | ±0.15mg/℃ |
| Bandwidth | – | 5-256Hz |
Gyroscope Parameters
| Parameter | Condition | Classic value |
| Range | – | ±2000°/s |
| Resolution | ±2000°/s | 0.061(°/s)/(LSB) |
| RMS noise | bandwidth=100Hz | 0.028-0.07(°/s)-rms |
| Zero drift | Placed horizontally | ±0.5-1°/s |
| Temperature drift | -40~+85℃ | ±0.005~0.015(°/s)/℃ |
| Bandwidth | – | 5-256Hz |
Magnetometer Parameters
| Parameter | Condition | Classic value |
| Range | – | ±2Gauss |
| Resolution | ±2Gauss | 0.0667mGauss/LSB |
Barometer Parameters
| Parameter | Condition | Classic value |
| Range | – | 300-1100hPa |
| RMS noise | Standard mode | 0.5Pa-RMS |
| Relative accuracy | – | ±0.06hPa |
Pitch Angle & Roll Angle Parameters
| Parameter | Condition | Classic value |
| Range | – | x: ±180°; y: ±90° |
| Tilt accuracy | Static | 0.1° |
| Tilt accuracy | Dynamic | 0.5° |
| Resolution | Placed horizontally | 0.0055° |
| Temperature drift | -40~+85℃ | ±0.5~1°/s |
Yaw Angle Parameters
| Parameter | Condition | Classic value |
| Range | – | Z: ±180° |
| Yaw accuracy | 9-axis algorithm, magnetic field calibration, dynamic/ static | 0.1° (free from magnetic interference) |
| Yaw accuracy | 6-axis algorithm, static | 0.5° (dynamic accumulation of integral errors) |
| Resolution | Placed horizontally | 0.0055° |
Specification
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps – 921600bps. |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit |
| Output speed | 10Hz by default. It can set to 0.2-200Hz |
| Operating temperature | -40-85℃ |
| Storage temperature | -40-100℃ |
| Shock resistance | 20kg |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more |
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm |
| Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Working voltage | 5V or 3.3V |
| Working current | 12mA |
| Start-up duration | 1000ms |
| Support | ROS1/ ROS2 |
| PC software compatible system | Windows |
| Weight | Without shell: 5.7g; With shell: 50g |

Technical Specifications
| Interface / Protocol | USB |
|---|---|
| SKU | AI6098 |
| Weight | 1.24 kg |
| Availability | In Stock |
Applications & Use Cases
The IMU Inertial Navigation Module ROS1/ROS2 Robot MEMS USB Magnetometer 10-axis ARHS Posture Sensor is a versatile imu, accelerometer, magnetometer & gyroscope used across a wide range of applications including electronics projects, DIY builds, prototyping, and educational experiments.
Common use cases:
- Integrating into a custom electronics project
- Learning and experimenting with circuits
- Replacing or upgrading components in existing setups
This product is ideal for electronics enthusiasts, engineers, and students.
Technical Tip: Always verify voltage and current requirements before connecting to your circuit. Check datasheets for detailed specifications and pin configurations.
Shipping & Delivery
- Free shipping on orders above ₹999 across India
- Dispatched within 1-3 business days
- Expected delivery: 3-7 business days depending on location
- Secure packaging to ensure safe transit of electronic components







{kind=link}
{kind=link}
Rishabh Mukherjee –
Bought this IMU Inertial Navigation Module ROS1/ROS2 Robot for my college project. Accurate readings, easy to code. Very happy!
Nikhil Rajan (verified owner) –
Decent IMU Inertial Navigation Module ROS1/ROS2 Robot for the price. Requires proper wiring but works well once set up.
Ishan Malhotra –
Nice IMU Inertial Navigation Module ROS1/ROS2 Robot. Readings are mostly accurate. Good enough for my hobby project.
Sunil Thakur –
Great IMU Inertial Navigation Module ROS1/ROS2 Robot. Using it in my smart agriculture system. Reliable measurements every time.
Shreyas Chatterjee (verified owner) –
Nice IMU Inertial Navigation Module ROS1/ROS2 Robot. Readings are mostly accurate. Good enough for my hobby project.
Divyansh Mukherjee (verified owner) –
Excellent sensitivity and range on this IMU Inertial Navigation Module ROS1/ROS2 Robot. Works better than I expected.
Nikhil Sethi (verified owner) –
Nice IMU Inertial Navigation Module ROS1/ROS2 Robot. Readings are mostly accurate. Good enough for my hobby project.
Paras Bhat (verified owner) –
Bought this IMU Inertial Navigation Module ROS1/ROS2 Robot for my college project. Accurate readings, easy to code. Very happy!
Lakshmi Sen –
Great quality IMU Inertial Navigation Module ROS1/ROS2 Robot. Calibrated it easily and the accuracy is impressive.
Deepak Bajaj (verified owner) –
Decent IMU Inertial Navigation Module ROS1/ROS2 Robot for the price. Requires proper wiring but works well once set up.
Anil Modi –
This IMU Inertial Navigation Module ROS1/ROS2 Robot is excellent for the price. My data logging project is working perfectly now.
Naman Malhotra –
Great quality IMU Inertial Navigation Module ROS1/ROS2 Robot. Calibrated it easily and the accuracy is impressive.
Prashant Desai (verified owner) –
Decent IMU Inertial Navigation Module ROS1/ROS2 Robot for the price. Requires proper wiring but works well once set up.
Aman Rajan (verified owner) –
Perfect for my weather station. This IMU Inertial Navigation Module ROS1/ROS2 Robot gives consistent readings day and night.
Ishaan Verma –
Good quality IMU Inertial Navigation Module ROS1/ROS2 Robot. Some variation in readings but within acceptable range.
Shreyas Yadav (verified owner) –
Superb IMU Inertial Navigation Module ROS1/ROS2 Robot! Using it in my environmental monitoring system. Very reliable data.
Harshit Patel (verified owner) –
Decent IMU Inertial Navigation Module ROS1/ROS2 Robot for the price. Requires proper wiring but works well once set up.
Ananya Arora (verified owner) –
This IMU Inertial Navigation Module ROS1/ROS2 Robot is excellent for the price. My data logging project is working perfectly now.
Ishan Chauhan –
Superb IMU Inertial Navigation Module ROS1/ROS2 Robot! Using it in my environmental monitoring system. Very reliable data.
Aarav Jain (verified owner) –
Nice IMU Inertial Navigation Module ROS1/ROS2 Robot. Readings are mostly accurate. Good enough for my hobby project.
Rahul Sethi (verified owner) –
Good quality IMU Inertial Navigation Module ROS1/ROS2 Robot. Some variation in readings but within acceptable range.
Jayesh Shah –
Very satisfied with this IMU Inertial Navigation Module ROS1/ROS2 Robot. Library support is good and it’s easy to interface.
Kabir Banerjee –
Love this IMU Inertial Navigation Module ROS1/ROS2 Robot. Response time is fast and readings are stable.
Tanvi Dubey (verified owner) –
Great quality IMU Inertial Navigation Module ROS1/ROS2 Robot. Calibrated it easily and the accuracy is impressive.
Vivek Kulkarni –
Excellent sensitivity and range on this IMU Inertial Navigation Module ROS1/ROS2 Robot. Works better than I expected.
Sandeep Banerjee (verified owner) –
Good IMU Inertial Navigation Module ROS1/ROS2 Robot. Works as described. Calibration needed some patience but results are good.
Deepak Luthra (verified owner) –
Bought this IMU Inertial Navigation Module ROS1/ROS2 Robot for my college project. Accurate readings, easy to code. Very happy!