






Stereo vision systems give the robots depth perception skills, which make artificial machines and systems develop an understanding of their environment by estimating the relative distance of objects in their vision from many visual cues. Hence, stereo vision are used in many areas of robotics, such as self-driving cars, drones for rescue missions, robots for remote surgery.
Arducam released this Stereo Camera MIPI Module Series for Raspberry Pi and Jetson Nano/Xavier NX. They directly connect to the MIPI CSI-2 connectors of the motherboards, and run with a V4L2 camera driver on those platforms. They offer better flexibility to be integrated into your own hardware design or run with your own algorithm on embedded systems for applications like depth sensing, 3d mapping, SLAM, etc.
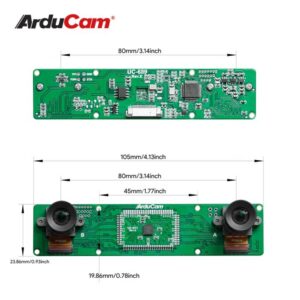
This Arducam 1MP Stereo Camera MIPI Module is a stereo camera module with two synchronized monochrome global shutter OV9281 image sensors (2x1MP). The monochrome sensor’s capable of excellent detail and sensitivity allow it to get higher accuracy and frame rates in extracting depth information.
Useful links:
- To use this camera on Raspberry Pi, please follow this tutorial for hardware and software setup.
- To use this camera on Jetson Nano, please follow this tutorial for hardware and software setup.
Features:
- Small in Size
- Color: Green
- Nvidia Jetson Nano/Xavier NX
- Arducam 1MPx2 Stereo Camera for Raspberry Pi
- Dual OV9281 Monochrome Global Shutter Camera Module
- Stereo vision systems give the robots depth perception skills
Packages Includes:
1 x Arducam 1MPx2 Stereo Camera for Raspberry Pi, Nvidia Jetson Nano/Xavier NX, Dual OV9281 Monochrome Global Shutter Camera Module



{kind=link}
{kind=link}
Reviews
There are no reviews yet.