

NEO-6M GPS Receiver Module
- Global Positioning System (GPS) makes use of signals sent by satellites in space and ground stations on Earth to accurately determine its position on Earth.
- The NEO-6M GPS receiver module uses USART communication to communicate with microcontroller or PC terminal.
- It receives information like latitude, longitude, altitude, UTC time, etc. from the satellites in the form of NMEA string. This string needs to be parsed to extract the information that we want to use.
For more information about GPS and how to use it, refer the topic GPS Receiver Module in the sensors and modules section.
Interfacing Diagram
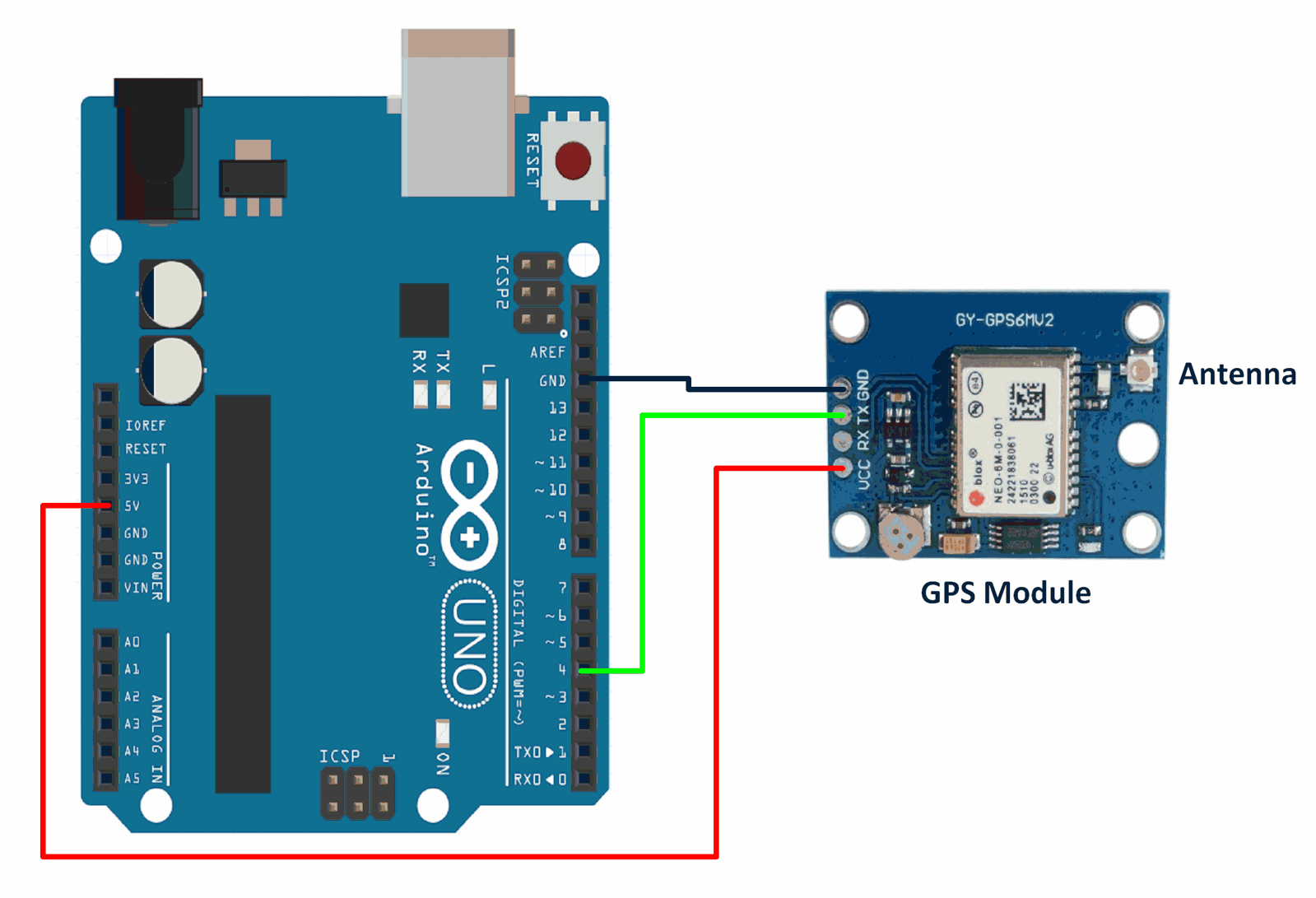 Interfacing NEO-6M GPS Receiver Module With Arduino UNO
Interfacing NEO-6M GPS Receiver Module With Arduino UNO
Example
We are going to display data(latitude, longitude, altitude and time) received by the GPS receiver module on the serial monitor of Arduino.
Here, we will be using Mikal Hart’s TinyGPSPlus library from GitHub.
Download this library from here.
Extract the library and add it to the libraries folder path of Arduino IDE.
Here, we have created a simplified sketch using the functions and header file provided by the Author of this library.
Note : If you see most of the data in ***** format, take the GPS connected to Arduino in an open space (balcony for example). The GPS may require some time to lock on to satellites. Give it around 20-30 seconds so that it can start giving you correct data. It usually takes no more than 5 seconds to lock on to satellites if you are in an open space, but occasionally it may take more time (for example if 3 or more satellites are not visible to the GPS receiver).
Sketch For Displaying GPS Parameters On Serial Monitor
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
/* Create object named bt of the class SoftwareSerial */
SoftwareSerial GPS_SoftSerial(4, 3);/* (Rx, Tx) */
/* Create an object named gps of the class TinyGPSPlus */
TinyGPSPlus gps;
volatile float minutes, seconds;
volatile int degree, secs, mins;
void setup() {
Serial.begin(9600); /* Define baud rate for serial communication */
GPS_SoftSerial.begin(9600); /* Define baud rate for software serial communication */
}
void loop() {
smartDelay(1000); /* Generate precise delay of 1ms */
unsigned long start;
double lat_val, lng_val, alt_m_val;
uint8_t hr_val, min_val, sec_val;
bool loc_valid, alt_valid, time_valid;
lat_val = gps.location.lat(); /* Get latitude data */
loc_valid = gps.location.isValid(); /* Check if valid location data is available */
lng_val = gps.location.lng(); /* Get longtitude data */
alt_m_val = gps.altitude.meters(); /* Get altitude data in meters */
alt_valid = gps.altitude.isValid(); /* Check if valid altitude data is available */
hr_val = gps.time.hour(); /* Get hour */
min_val = gps.time.minute(); /* Get minutes */
sec_val = gps.time.second(); /* Get seconds */
time_valid = gps.time.isValid(); /* Check if valid time data is available */
if (!loc_valid)
{
Serial.print("Latitude : ");
Serial.println("*****");
Serial.print("Longitude : ");
Serial.println("*****");
}
else
{
DegMinSec(lat_val);
Serial.print("Latitude in Decimal Degrees : ");
Serial.println(lat_val, 6);
Serial.print("Latitude in Degrees Minutes Seconds : ");
Serial.print(degree);
Serial.print("\t");
Serial.print(mins);
Serial.print("\t");
Serial.println(secs);
DegMinSec(lng_val); /* Convert the decimal degree value into degrees minutes seconds form */
Serial.print("Longitude in Decimal Degrees : ");
Serial.println(lng_val, 6);
Serial.print("Longitude in Degrees Minutes Seconds : ");
Serial.print(degree);
Serial.print("\t");
Serial.print(mins);
Serial.print("\t");
Serial.println(secs);
}
if (!alt_valid)
{
Serial.print("Altitude : ");
Serial.println("*****");
}
else
{
Serial.print("Altitude : ");
Serial.println(alt_m_val, 6);
}
if (!time_valid)
{
Serial.print("Time : ");
Serial.println("*****");
}
else
{
char time_string[32];
sprintf(time_string, "Time : %02d/%02d/%02d \n", hr_val, min_val, sec_val);
Serial.print(time_string);
}
}
static void smartDelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (GPS_SoftSerial.available()) /* Encode data read from GPS while data is available on serial port */
gps.encode(GPS_SoftSerial.read());
/* Encode basically is used to parse the string received by the GPS and to store it in a buffer so that information can be extracted from it */
} while (millis() - start < ms);
}
void DegMinSec( double tot_val) /* Convert data in decimal degrees into degrees minutes seconds form */
{
degree = (int)tot_val;
minutes = tot_val - degree;
seconds = 60 * minutes;
minutes = (int)seconds;
mins = (int)minutes;
seconds = seconds - minutes;
seconds = 60 * seconds;
secs = (int)seconds;
}
Supporting FilesSource Code
- GPS_Interfacing_With_Arduino_INO Download 2581
Attached File
- TinyGPSPlus Library Download
2312
- Fundamentals of GPS Receivers Download 23







Leave a reply